What you need to know before starting an assembly ...
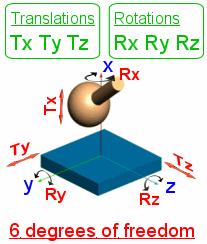
Degrees of freedom and mechanical connections (linking)
|
|||||||||||||||||||
|
|||||||||||||||||||
The characteristics of the elementary links are accessible below from the theoretical contacts :
Note: The "theoretical" contact represents the common part of the surfaces in contact of the two parts. We speak of point contact when the common surface is writable in a square of very small dimension, of linear contact when it is a narrow band compared to its length ...)
Click on the icon corresponding to your example to characterize its linking model.

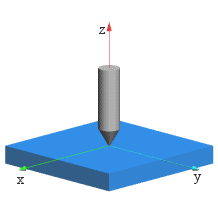
It is a point connection of normal Z

It is a edge slider connection of normal Z

It is a sphere in cylinder connection of axis X and center O

It is a planar connection of normal Z

It is a spherical slider connection of center O

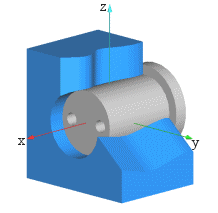
It is a cylindrical connection of axis X

It is a revolute connection of axis X

It is a prismatic connection of direction X