|
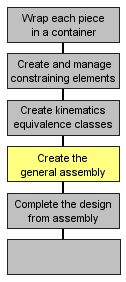
Click on the boxes |
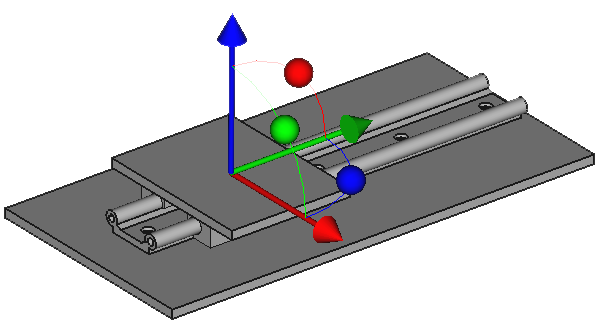
The general (or global) assembly will be a composition of the sub-assemblies associated with the kinematic equivalence classes. It will therefore also be integrated into its own assembly container. The constraints used will define partial mechanical connections, leaving at least one degree of freedom each time. It is from this moment that we can "test" the functioning of the mechanism, before soon (?) being able to animate it.
|