|
Click on the boxes ... |
In this step, it is a question of bringing together in a global assembly the kinematic equivalence classes constructed previously.
|
|
|
Create the global assembly |
|
|
Click on the boxes ... |
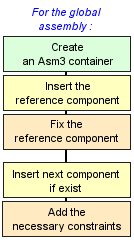
For the global assembly It is necessary to create a new file and save it before doing anything.
Three steps will need to be addressed here : How to create an assembly container ? How to insert a component into an assembly container ? How to fix the reference component ?
Reminder : it is necessary to fix the reference component so that the following components are positioned in relation to it and not the other way around.
The following video shows you the procedure :
|
|
Click on the boxes ... |
For the global assembly
Two steps will need to be addressed here : How to insert a new component into an assembly container ? How to add the necessary constraints ?
Reminder : it is necessary to fix the reference component so that the following components are positioned in relation to it and not the other way around.
The following video shows you the procedure :
|